Quaternions and rotations
Introduction
Quaternion is a generalization of complex numbers with three imaginary numbers (\(i\), \(j\) and \(k\) ). It is a four-dimensional complex number that can be used to represent the orientation of a rigid body or coordinate frame in three-dimensional space. The general definition of a quaternion is given by:
$$ Q=a+b.i+c.j+d.k = \left[ \begin{matrix} a && b && c && d \end{matrix} \right] $$
Representation
Quaternions represents a rotation tranformation in 3D. It can be expressed from Euler angles as on this online visualization. Therefore, the easiest way to represent a quaternion is to imagine the rotation of a given angle around a given vector. The following figure illustrates the rotation of angle \( \theta \) around vector \( \vec{V} \) defined by 3 scalars ( \( V_x \), \( V_y \) and \( V_z \)) :
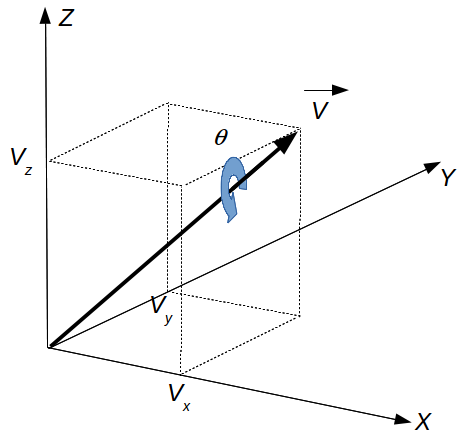
The quaternion associated to this transformation is given by:
$$ Q = \left[ \begin{matrix} q_w && q_x && q_y && q_z \end{matrix} \right] $$
$$ Q = \left[ \begin{matrix} cos \frac{\theta}{2} && V_x.sin \frac{\theta}{2} && V_y.sin \frac{\theta}{2} && V_z.sin \frac{\theta}{2} \end{matrix} \right] $$
Rotation around axes
Based on the previous formula, we can now calculate the quaternion defining a rotation around each axis:
Rotation around X
$$ Q_X=\left[ \begin{matrix} cos \frac{\theta}{2} && sin \frac{\theta}{2} && 0 && 0 \end{matrix} \right] $$
Rotation around Y
$$ Q_Y=\left[ \begin{matrix} cos \frac{\theta}{2} && 0 && sin \frac{\theta}{2} && 0 \end{matrix} \right] $$
Rotation around Z
$$ Q_Z=\left[ \begin{matrix} cos \frac{\theta}{2} && 0 && 0 && sin \frac{\theta}{2} \end{matrix} \right] $$
General rotation
Let's now assume we want to calculate the coordinates of a given vector \( \vec{v}_A \) (or point) rotated according to the quaternion \( {}^BQ_A \). The resulting vector \( \vec{v}_B \) ) can be calculated by the following formula based on the quaternion product and quaternion conjugate.
$$ \vec{V}_B = {}^BQ_A \otimes \vec{V}_A \otimes \overline {{}^BQ_A} $$
Note that \( \vec{V}_A \) and \( \vec{V}_B \) live in \( \mathbb{R}^4 \) while \( \vec{v}_A \) and \( \vec{v}_B \) live in \( \mathbb{R}^3 \). \( \vec{V}_A \) and \( \vec{V}_B \) are pure quaternions whose real parts are zero:
$$ \vec{V}_A = \begin{bmatrix} 0 \\ \vec{v}_A \end{bmatrix} = \begin{bmatrix} 0 \\ x_A \\ y_A \\ z_A \end{bmatrix} $$
$$ \vec{V}_B = \begin{bmatrix} 0 \\ \vec{v}_B \end{bmatrix} = \begin{bmatrix} 0 \\ x_B \\ y_B \\ z_B \end{bmatrix} $$
Another way to visualize the previous result is to consider that \( \vec{Q_{V_A}} \) and \( \vec{Q_{V_B}} \) are the same vector described in frame \( A \) and frame \( B \) respectively. The quaternion \( {}^BQ_A \) represents the transformation from frame \( A \) and frame \( B \).
Example
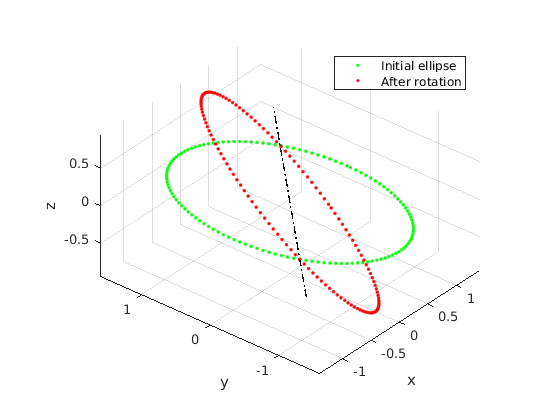
This simple example shows the rotation of an ellipse defined in the plane { \( \vec{X} \) , \( \vec{Y} \) }. The green and red points are respectively the initial and final position of the ellipses. The black dash-dotted line is the rotation axis. The rotation angle is \( \frac {\pi}{4} \) and the rotation vector is given by:
$$ V_R = \begin{bmatrix} 1 \\ 1 \\ 0 \end{bmatrix} $$
Download
Files for the previous example can be downloaded here:
Credit: based on the Madgwick's quaternion library for Matlab.
See also
- Quaternions and gyroscope
- Quaternion conjugate
- Quaternion normalization
- Quaternion product
- Quaternion to rotation matrix