Angular and linear velocity, cross product
This page explains how to use the cross product to convert linear velocity to angular velocity (or the reverse).
From linear to angular
Let's consider the body C, rotating around the point O. The linear speed of point A is given by \( \vec{V} \).
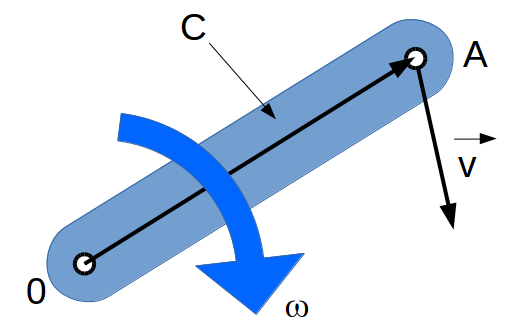
The angular velocity around O is given by :
$$ \vec{\omega} = \frac {\vec{OA} \times \vec{V}} { \| \vec{OA} \| ^2 } $$
From angular to linear
Assuming the angular velocity is known, the linear speed at point A is given by:
$$ \vec{V} = \vec{\omega} \times \vec{OA} $$
Example
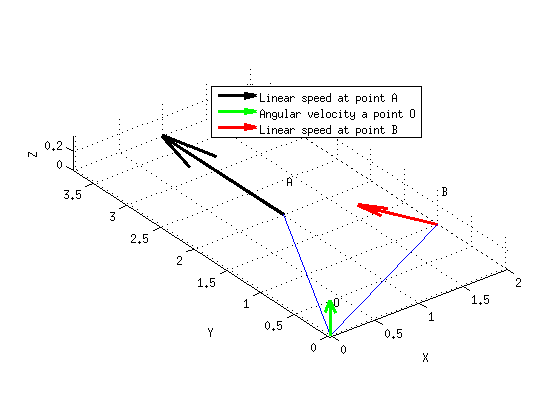
The following Matlab code shows how to convert linear velocity to angular velocity and vice-versa:
close all;
clear all;
clc;
%% Parameters
% Coordinates of point O
O=[0;0;0];
% Coordinates of point A
A=[1;2;0];
% Coordinates of point B
B=[2;1;0];
% Speed applied at point A
VA=[0;2;0];
%% Compute angular velocity
% Compute vector OA
vOA=A-O;
% Compute angular speed around point A
wO=cross (vOA,VA)/(norm(vOA)*norm(vOA));
%% Compute linear speed at point B
vOB=B-O;
VB=cross(wO,vOB);
%% Draw system
plot3(O(1),O(2),O(3));
hold on;
line ([O(1) A(1)],[O(2) A(2)],[O(3) A(3)]);
line ([O(1) B(1)],[O(2) B(2)],[O(3) B(3)]);
text(O(1)+0.2,O(2)+0.2,O(3)+0.2,'O','FontSize',100);
text(A(1)+0.2,A(2)+0.2,A(3)+0.2,'A','FontSize',100);
text(B(1)+0.2,B(2)+0.2,B(3)+0.2,'B','FontSize',100);
% Draw speed at point A
hFA=quiver3 (A(1),A(2),A(3),VA(1),VA(2),VA(3),'Color','k','LineWidth',3,'MaxHeadSize',1.5);
% Draw speed at point O
hTO=quiver3 (O(1),O(2),O(3),wO(1),wO(2),wO(3),'Color','g','LineWidth',3,'MaxHeadSize',1.5);
% Draw speed at point B
hFB=quiver3 (B(1),B(2),B(3),VB(1),VB(2),VB(3),'Color','r','LineWidth',3,'MaxHeadSize',1.5);
% Display axis and legends
grid on;
axis square equal;
xlabel('X');
ylabel('Y');
zlabel('Z');
legend ([hFA,hTO,hFB],'Linear speed at point A','Angular velocity a point O','Linear speed at point B');See also
- Configurable gear for solidwork
- Elastic collision - Part 1 - Hypotheses
- Elastic collision - Part 2 - Velocity decomposition
- Elastic collision - Part 3 - Velocity calculation
- Elastic collision - Part 4 - Synthesis and reminder
- Elastic collision - Part 5 - Source code
- Elastic collision - Equations and simulation
- Enable Add-Ins in Solidworks
- Newton's Second Law of motion
- Geometric model for differential wheeled mobile robot
- How to insert gears in a Solidwoks assembly
- Mathematical model of a mechanical differential
- Model of a rotary joint driven by a linear motor [Part 2]
- Model of a rotary joint driven by a linear motor [Part 3]
- Model of a rotary joint driven by a linear motor [Part 4]
- Model of a rotary joint driven by a linear motor
Last update : 02/04/2020